얼른 로봇 프로그래밍 작업을 하고 마무리 지어야 하는데…덩치가 크다보니 어디 놓고 작업할 공간이 없어
지지부진이다. 이렇게 2020년의 최대 목표를 달성하지 못하고 2021년을 맞이했다…ㅠ.ㅠ
그렇다고 아무것도 안한 것은 아니지만 뭔가 마무리를 하지 못했다는 것은 그 자체로 매우 찜짐한 일임은
분명하다.
그럼 그동안 무엇을 했느냐?
물론 1차적으로는 내 업무와 관련된 여러가지 공부를 하였다. 본업이 프로그래머다보니 공부를 안할 수가
없다. 문제는 얼마나 현재 직무와 관련성이 있느냐인데…업무 관련성보다는 내 개인적인 선호도를 위주로
공부를 하다보니 이게 영~ 쓸모가 있는 공부인지 잘 모르겠다…ㅠ.ㅠ 그래도 올해는 직무 관련이 있는 분야도
하나 넣었다.
다음으로는 3D 모델링 독학이다.
이미 로봇 개발 당시 Fusion 360을 나름 독학하여 열심히 모델링하고 출력하고 해서 외형은 다 완성을
해놓았지만 여전히 목마른 부분이 있는 것은 어쩔 수가 없다. 그래서 올해부터는 무료라서 가장 매리트가 있는
블렌더를 추가로 공부하기 시작했다. 그리고 이 3D 모델링이 오늘 이야기하고자 하는 중요 주제이다.
마지막으로 그림 연습이다.
사실 이건 해야하나 말아야 하나 아직도 고민이다. 그저 시간을 까먹는 일이 될지, 아니면 내꿈을 이루기 위한
중요한 한 수가 될지…간간이 언급한 것 같은데 나의 최종 목표는 스토리를 갖는 메카닉을 만드는 것이다.
가장 쉽게 예를 들자면 선라이즈와 반다이를 합친 것 같은 작품활동…물론 개인으로서 그런 작업을 한다는
것이 불가능에 가까워 보이지만, 자만일지 오만일지, 잡을 수 없는 먼 곳에 있는 꿈은 아닌 듯하다^^
어쨌든 위의 3가지는 올해의 집중 목표이기도 하다. 하지만 워낙 성격이 다른 분야가 뒤섞이다보니 한가지에
집중을 하지 못하는 문제가 있다. 독학으로 익히자면 수없이 많은 시간을 투자해도 모자랄 판인데 여러 분야를
적은 시간만을 투자하면서 진행하기는 매우 어려울 것으로 보인다. 하지만 어려울 뿐 불가능은 아니라는 생각으로
열심히 부대껴볼 생각이다.
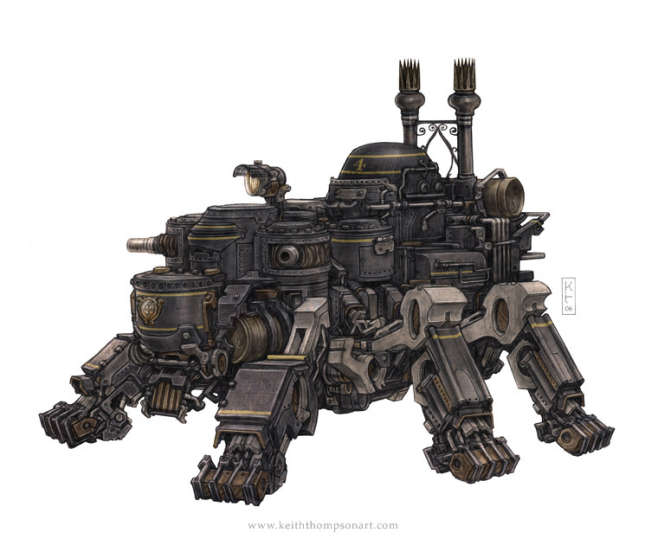
로봇의 미학
현재 진행 중인 4족 보행 로봇 MORS 프로젝트를 시작할 때도 언급을 했지만 내가 만들고자 하는 로봇, 내가
생각하는 로봇에서 제일 중요한 요소는 ‘아름다움’이다. 아름다움이라 해도 매우 주관적인 관념이니 내가
생각하는 기준을 좀더 구체적으로 말하자면 ArtStation이나 Pinterest에서 로봇을 검색하면 나오는 화려한
컨셉아트에서 보여지는 그러한 로봇이다. 하지만 또 한편으로는 로봇은 statue가 아니다. 로봇은 움직여야
한다.
결국 내가 만들고 싶은 것은 아름다우면서도 실제 움직이는 로봇을 만들고 싶은 것이다.
사실 이미 전문 로봇 제조 업체나 완구업체에서 만드는 로봇들도 다자인이 많이 세련되어져서 갖고싶은 생각이
들게 하지만 나는 역시 나만의 컨셉으로 나만의 스토리를 가진 로봇을 만들고 싶은 것이다.


Hard Surface 모델링
사실 정확한 의미는 모르겠다. 다만 이름 그대로 정적이고 단단한 물체, 인공적인 것들 중 기계류나 건축물에
속하는 것들을 모델링하는 것이라 보여진다. 물론 좀 더 모델링적으로 접근하면 버텍스나 엣지에 대한 여러
제약들이 언급되기는 하지만 내 지식 밖이니…-.-
Pinterest에서 Hard Surface Modeling으로 검색을 하면 엄청난 이미지들이 나오는데 대체로 금속성의
사이버틱한 형태를 가진 이미지들이 검색된다. 로봇이나 우주선 모델링에 딱 좋을만한 그런 이미지들…
결국 욕심이 생길 수밖에 없다.
그런데 앞서 말했듯이 모델링의 관점에서 보자면 버텍스나 엣지에 대한 제약들이 들어가는데 현재 주로 사용
중인 Fusion 360은 버텍스나 엣지보다는 프로파일이나 솔리드 오브젝트를 중심으로 모델링을 하기 때문에
세밀한 Hard Surface Modeling은 쉽지 않아보인다. 물론 내가 아직 익히지 못한 Surface Modelig을
이용한다면 더 나은 작업을 할 수는 있을 것 같고 또 유튜브에서 Fusion 360 Hard Surface Modeling을
검색해보면 꽤 많은 작품들의 제작 과정 영상이 검색되는데 말하자면 명필은 붓을 가리지 않는다고, 결국
중요한 것은 나의 실력이지 툴이 아니라는 결론에 이르렀다. 그래서 조금 더 Fusion 360에 집중해보기로
했다.
하지만 Blender의 경우 기본적으로 버텍스(점), 엣지(선), 페이스(면)을 자유자재로 변형하면서 모델링을 하는
툴이다보니 좀 더 다양한 형태를 만들 수 있을 것 같긴 하나 다룰 수 있는 포인터가 많은만큼 모양이 틀어진
경우 손이 상당히 많이 가는 것 같아 이 역시 쉽지는 않아보인다. 그래도 보험 들어놓는다는 차원에서 Blender
또한 공부는 해볼 생각이다.
돈만 많다면…3DS Max를 써볼텐데…ㅠ.ㅠ



3D 프린팅을 위한 Hard Surface 모델링 실험
하지만 또한가지 난관이 있다.
모델링이 잘 되었어도 결국은 3D 프린터를 이용해 출력을 해야 하는데 SLA나 DLP 프린터가 아니라면 사실상
모델링한 디테일을 모두 살리기가 어렵다는 것이다. 그렇다고 유지비가 비싼 SLA/DLP 프린터를 사는 것도
그리 만만한 일은 아니다. 결국 어느정도 모델링이 FDM 프린터에서도 디테일을 어느정도 살리면서 보기 좋게
출력이 되는지 실험을 하기로 했다.
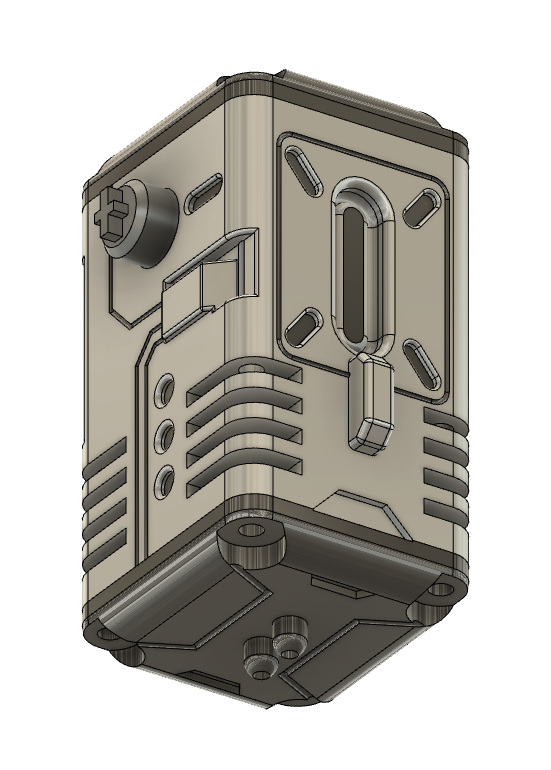
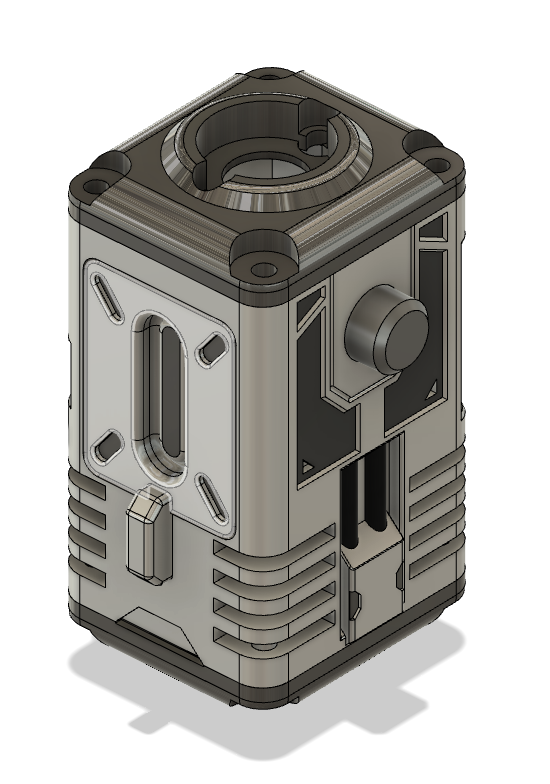
일단 모델링 대상은 내가 제일 많이 사용하고 있는 N20 계열의 소형 DC 모터의 케이스이다.
그냥 모터만 덩그러니 구동부에 고정시키기 보다는 보다 시각적인 효과를 주면 좋을 것 같아 크기도 작고 많이
사용하는 N20 모터에 덧씌울 케이스를 만들어보기로 한 것이다.
우선 모델링은 Fusion 360으로 아래와 같이 하였다. 당연히 Pinterest에서 검색되는 이미지들과는 다르게
투박하고 촌스러운 모델링이 되었다…ㅠ.ㅠ




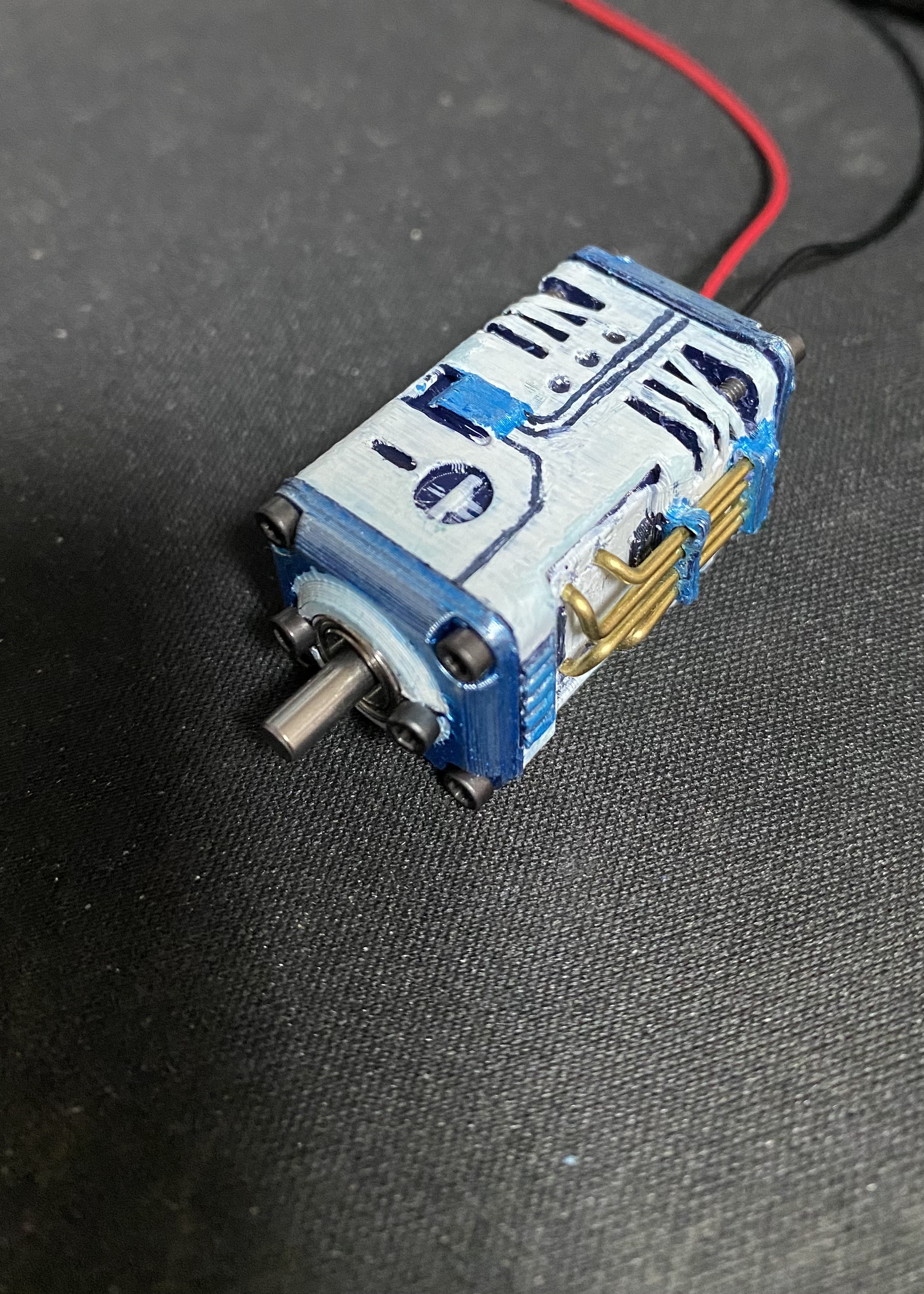
문제는 출력 이후다. 그래도 나름 FDM 프린터의 특성을 감안하여 가능한한 너무 얇아지는 부분이 없도록
신경써서 모델링(그래서 더더욱 샤프한 맛이 없어졌다)을 했고 출력 품질도 적층 높이 0.12mm로 출력을
했는데도 불구하고 형체를 구분하기 쉽지 않은 부분, 조금만 힘을 줘도 부서지는 부분들이 많았다. 게다가
크기가 작다보니 퍼티질이나 사포질은 감히 엄두도 내지 못하는 상태였다.
그런 문제를 상쇄하기 위해 일단 건담마커를 이용해 도색을 하였는데 아무래도 후가공 없이 도색을 하다보니
도색 후의 상태 역시 메롱일수밖에 없다…ㅠ.ㅠ





정리
비록 미숙한 모델링에 미숙한 프린팅 설정이지만 그래도 가능성은 보였다. 크기가 작은만큼 디테일을 좀
줄이고 결합되는 다른 부품과의 연결을 통해서 디테일을 살린다면 Fusion 360으로 모델링한 후 FDM으로
출력해도 제법 준수한 부품을 출력할 수 있을 것 같다.
사실 이 글을 쓰기 전에 SLA/DLP 프린터로 출력하면 확실히 더 나을 것 같아 몇군데 견젹을 의뢰했었는데
총 5개의 부품으로 이루어진 모델링 파일 2세트를 출력하는데 작게는 44,000원에서 많게는 440,000원 까지
조금은 부담스러운 견적이 나와 그냥 포기했다(그렇다고 저 가격들이 불합리하다는 것은 아니다).
아무튼 수정 방향을 잡았으니 계속 학습과 실험을 이어 나가야 겠다.
그나저나 내 4족 보행 로봇은 언제 완성하나…ㅠ.ㅠ
#블로그/로봇개발