2019/08/05 - [로봇] - 인생 프로젝트 시작 - MORS 프로젝트 #1 개요
인생 프로젝트 시작 - MORS 프로젝트 #1 개요
내가 아두이노를 처음 접한 것이 2016년 5월 이었다. 그리고 내 인생에는 새로운 세상이 열렸고, 나의 학문적 정체성이 그 실체를 드러냈다. 나는 문돌이의 탈을 쓴 공돌이였음을 커밍아웃 할 수��
mazdah.tistory.com
2020/05/17 - [로봇] - 인생 프로젝트 시작 - MORS 프로젝트 #2 Restart
인생 프로젝트 시작 - MORS 프로젝트 #2 Restart
인생 프로젝트 시작 - MORS 프로젝트 #1 개요를 작성한 것이 19년 8월 5일이었다. 그리고 어언 9개월이 넘게 지나버렸다. 회사일과 가정사로 이래저래 바쁜 나날로 손을 대지는 못했지만 머릿속에서
mazdah.tistory.com
https://mazdah.tistory.com/865
인생 프로젝트 시작 - MORS 프로젝트 #4 다리 제작
2019/08/05 - [로봇] - 인생 프로젝트 시작 - MORS 프로젝트 #1 개요 2020/05/17 - [로봇] - 인생 프로젝트 시작 - MORS 프로젝트 #2 Restart 2020/05/30 - [로봇] - 인생 프로젝트 시작 - MORS 프로젝트 #3 Model..
mazdah.tistory.com
2020/08/16 - [로봇] - 인생 프로젝트 시작 - MORS 프로젝트 #5 조립 완료… 그러나…
인생 프로젝트 시작 - MORS 프로젝트 #5 조립 완료… 그러나…
이 프로젝트를 RESTART한 것이 올해 5월 17일… 거의 3개월 전이다. 그동안 상당히 많은 부품을 모델링하고 출력하고…또 일부는 출력대행을 맡기고… 테스트를 위해 조립하고… 잘못된 설계를 바�
mazdah.tistory.com
이번 프로젝트를 진행하기 전에도 여러차례 로봇 제작을 시도한 일이 있었다.
당시에는 아는 툴이 Autodesk사의 123D Design이라는 무료 툴밖에 없어서 그것으로 모델링 아닌
모델링을 했었다. 다만 안타깝게도 3D 프린터 출력 사이즈가 너무 작다보니 부품을 최대한 작게 분할해야
했고 또 이전 3D 프린터의 레벨 잡기가 너무 어려워 실제 출력은 모델링한 부품 중 일부만 진행하였다.
Fusion 360을 만나다.
그러던 중 작년에 처음 Fusion 360을 알게 되었다. 123D Design이 공식적으로 서비스 종료되면서
대체할 툴을 찾던 중 비교적 전문적인 툴이면서 무료로 사용할 수 있는 툴이다보니 선택하지 않을 이유가
없었다. 물론 사용법이 복잡하면 어쩌나 하는 두려움도 있었지만…

그러한 두려움 때문에 사실상 작년에는 거의 사용을 하지 못했다. 뭐 그런 이유 때문만이 아니라 작년에는
고도화 프로젝트와 집에 우환이 있어 아무 것도 하지 못하고 있을 때였기도 하고…
그러다가 느즈막히, 올해 3월 말에 금년의 계획을 정하면서 제대로(?) 모델링 공부를 해보자고 생각하고
열심히 유튜브 강좌를 보면서 나름 공부를 하였고 드디어 4족 보행 로봇의 다리 한짝을 대충이나마
모델링 할 수 있게 되었다.

물론 혼자 야매로 배운 탓에 많은 부분 실수의 연속이었다. 스케치 면이 중구난방이다보니 모델링한
바디들이 제대로 위치를 못잡는 경우가 허다했고, 바디나 컴포넌트끼리 엉켜서 에러를 뱉는 경우도
셀 수 없이 많았다. 그래도 어찌어찌 목표한 바는 이루었다고 자평한다.
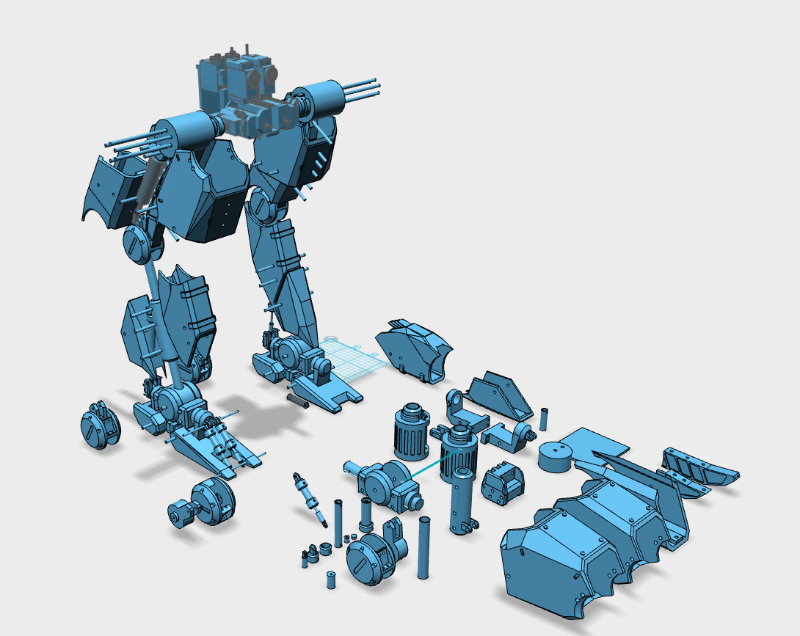
모델링
모델링된 대상은 4족 보행 로봇의 다리 프레임으로 구동부와 관절부를 포함하고 있다.
Fusion 360을 사용하면서 가장 맘에 들었던 기능은 바로 join였다. 물론 위의 이미지처럼 예전에
썼던 123D Design도 자석 기능으로 개별 부품들을 서로 붙일 수 있었다. 하지만 그것은 접착제로
붙인 효과 이상은 아니었다. 조립된 물체가 제대로 움직이는지 확인할 길이 없었다.
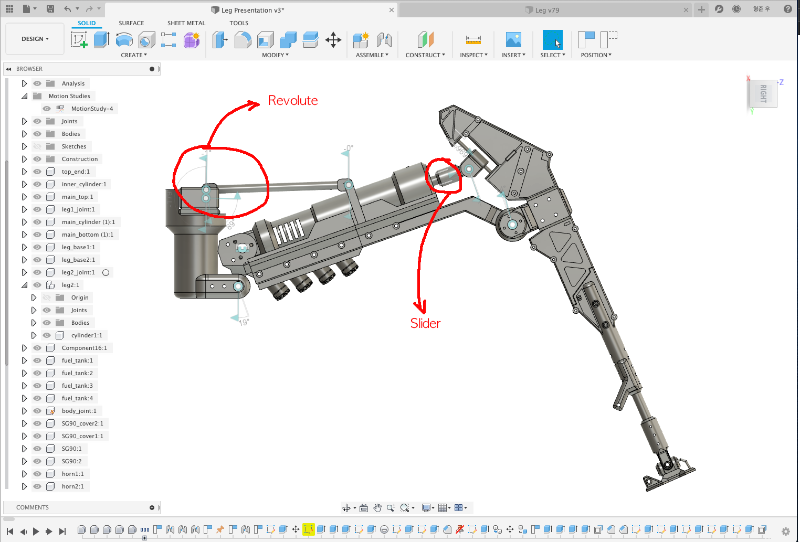
하지만 Fusion 360의 joint 기능에는 motion을 추가하여 지정한 모션에 따른 움직임을 바로 확인해
볼 수 있었다. 로봇의 다리에는 많은 모션이 필요하진 않고 아래 이미지에서 보는 바와 같이 회전운동
(Revolute)과 직선운동(Slider)만 있으면 되었다.
그렇다고 마냥 쉽지만은 않았다. 분명히 움직여야 할 것 같은 구조에서 움직이지 않는 경우가 다반사였다.
다행히 네이버의 Fusion 360 카페에서 도움을 받아 해결을 했는데 다음의 2가지 사항을 유의하면서 하니
제법 잘 동작했다.
-
가능하면 바로 rigid joint를 사용하지 말고 rigid group을 이용하자
-
가능하면 As-built joint를 이용하자
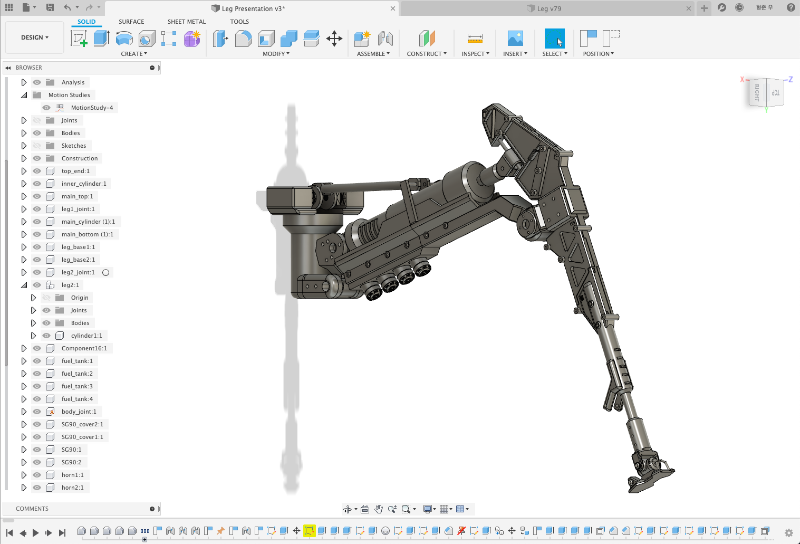
그리고 이렇게 joint된 물체를 움직여볼 수도 있었다. Motion Study라는 기능을 이용하여 원하는
움직임을 구성한 후 플레이하면 미리 시뮬레이션을 해볼 수 있는 것이다. 그런데 버그인지 내가 뭔가
잘못한 것인지 원래 플레이 버튼만 누르면 동작이 실행되어야 하는데 50프레임 이후 동작이 실행되지
않았다. 하지만 내가 타임라인 바를 움직이면 아래 동영상처럼 정상 동작하였다.
아직 모든 관절 부위가 다 구현된 것은 아니자만 일단 실물 테스트를 해보기에는 충분하다고 보인다.
또하나 재밌는 기능은 Animation 워크스페이스의 Auto Explode 기능을 이용하면 부품 전개도를
쉽게 만들 수 있다는 것이었다. 바로 아래 이미지와 같은…
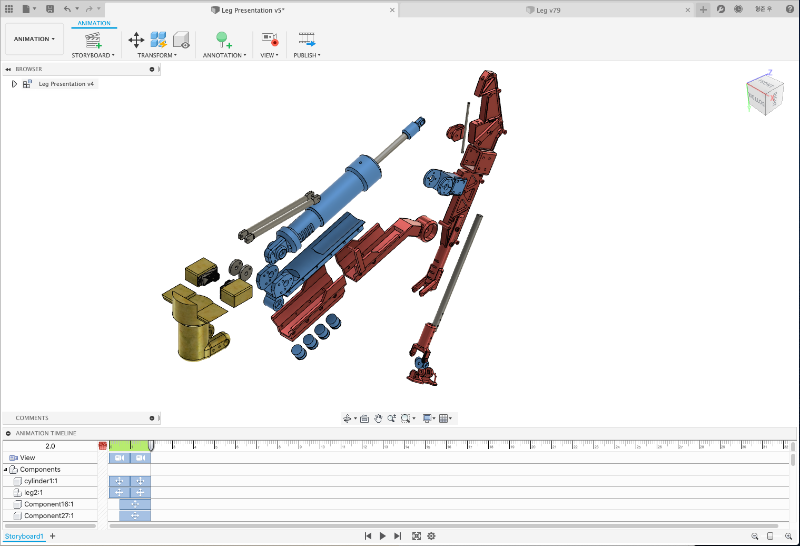
그런데 역시나 무얼 잘못했는지(아마도 컴포넌트 하나에 다른 컴포넌트가 들어가버려서 그런 듯)
나는 Auto Explode 기능이 에러가 나면서 실행되지 않았다. 대신에 Transform Component라는
기능을 이용했는데 부품을 하나하나 직접 움직여줘야 했지만 그리 어렵지는 않았다. 이렇게 한 후
애니메이션을 플레이하면 이런 장면을 볼 수 있다.
마지막으로 부끄럽지만 전체 모습과 모델링 과정을 동영상으로 한 번 보고 마무리 하자

정리
아직은 모든 것이 엉망이다. 앞에서도 언급했듯이 아직은 스케치부터 엉망이라 뒷수습이 안되는 경우도
많고, 애초에 밑그림조차 없이 머릿속에 있는 것을 바로 Fusion 360으로 구현하려니 뭔가 비례나 균형이
안맞는 부분도 있고, 나름 디테일을 더해보려고 핀터레스트에서 kit bash나 hard surface 등을 검색하며
흉내를 내보지만 뭔가 어설프고…ㅠ.ㅠ
그래도 Fusion 360이라는 좋은 툴을 알게 되어 얼마나 다행인지 모르겠다. 내가 계획한 일에 한걸음 더
다가선 느낌도 좋지만 Fusion 360을 공부하는 것 자체 또한 생각 외로 재밌는 일이다. 다만 앞으로 좀 더
신중하게 모델링하여 더 나은 결과물이 나오도록 해봐야겠다.
일단 이쯤에서 모델링한 것들을 3D 프린터로 뽑아서 실제 동작을 확인해봐야 할 것 같다.
이번 주말부터 3D 프린터를 돌려야 하는데…또 얼마나 시간이 걸릴지…ㅠ.ㅠ
맘같아서는 출력 대행을 맡기고 싶지만 비용이…ㅠ.ㅠ
그냥 서두르지 말고 차근차근 진행해야겠다.
'로봇' 카테고리의 다른 글
| 인생 프로젝트 시작 - MORS(4족보행로봇) 프로젝트 #5 조립 완료… 그러나… (2) | 2020.08.16 |
|---|---|
| 인생 프로젝트 시작 - MORS(4족보행로봇) 프로젝트 #4 다리 제작 (0) | 2020.07.28 |
| 인생 프로젝트 시작 - MORS(4족보행로봇) 프로젝트 #2 Restart (0) | 2020.05.17 |
| 인생 프로젝트 시작 - MORS 프로젝트 #1 개요 (0) | 2019.08.05 |
| [Scratch building] 도전! Scratch Building! (0) | 2018.10.09 |



